Robust Point Cloud Registration Framework Based on Deep Graph Matching
先通过特征提取器提取点特征,然后转化为图的形式,之后使用图特征提取器提取特征,用于更新点特征。再建图提取特征,最终通过特征向量的相似性构建相似性矩阵 $\tilde{C}$。之后将软分配的相似矩阵 $\tilde{C}$ 转化为硬分配矩阵 $C$,再通过 SVD 求解旋转矩阵和平移向量。
1. Problem Formulation
对于源点云 \(\mathbf{X}=\left\{x_i\in\mathbb{R}^3 \mid i=1,\cdots,N\right\}\) 和目标点云 \(\mathbf{Y}=\left\{y_j\in\mathbb{R}^3 \mid j=1,\cdots,M\right\}\),点云配准的目标是找到一个旋转变换 ${\mathbf{R},\mathbf{t}}$ 来将这两个点云对齐,其中 $\mathbf{R}\in\mathbf{SO}(3)$ 为旋转矩阵, $\mathbf{t}\in\mathbb{R}^3$ 为平移向量。
而 $\mathbf{X}$ 和 $\mathbf{Y}$ 之间的对应关系用二值矩阵 \(\mathbf{C}\in \{0,1\}^{N\times M}\) 来表示:如果 $\mathbf{C}_{ij}=1$,那么表示 $x_i$ 在 $\mathbf{Y}$ 中的对应点为 $y_j$。
如果 $\mathbf{X}$ 和 $\mathbf{Y}$ 是完全等价的话,也就是每个 $x_i$ 都会在 $\mathbf{Y}$ 中有一个点 $y_j$ 与之对应。那么目标函数就可以写成
\[\boldsymbol{e}(\mathbf{C}, \mathbf{R}, \mathbf{t})=\sum_{i}^{N} \sum_{j}^{M} \mathbf{C}_{i, j}\left\|\mathbf{R} x_{i}+\mathbf{t}-y_{j}\right\|_{2}^{2}\\\]这里 $\mathbf{C}$ 矩阵的每一行和每一列都有且只有一个位置的值为1,剩下的全为0,即
\[\sum_{j}^{M} \mathbf{C}_{i, j}=1, \forall i,\ \sum_{i}^{N} \mathbf{C}_{i, j}=1, \forall j,\ \mathbf{C}_{i, j} \in\{0, 1\}^{N \times M}, \forall i, j\\\]但是在实际情况中,有可能会出现 $x_i$ 在 $Y$ 中没有对应点的情况,这时等式约束就从 \(\sum_{j}^{M} \mathbf{C}_{i, j}=1\) 变成了不等式约束 \(\sum_{j}^{M} \mathbf{C}_{i, j}\leq 1\)。作者对此的应对方法是添加一个松弛变量 $\mathbf{C}_{i,M+1}$,使得约束条件重新变成等式约束:
\[\sum_{j}^{M} \mathbf{C}_{i, j} \leq 1, \forall i \rightarrow \sum_{j}^{M+1} \mathbf{C}_{i, j}=1, \forall i \leq N\\\]这里的 $\mathbf{C}$ 为一个 $(N+1)\times(M+1)$ 的矩阵。
在确定了对应关系之后,就可以使用 SVD 方法求解了。
2. RGM 网络
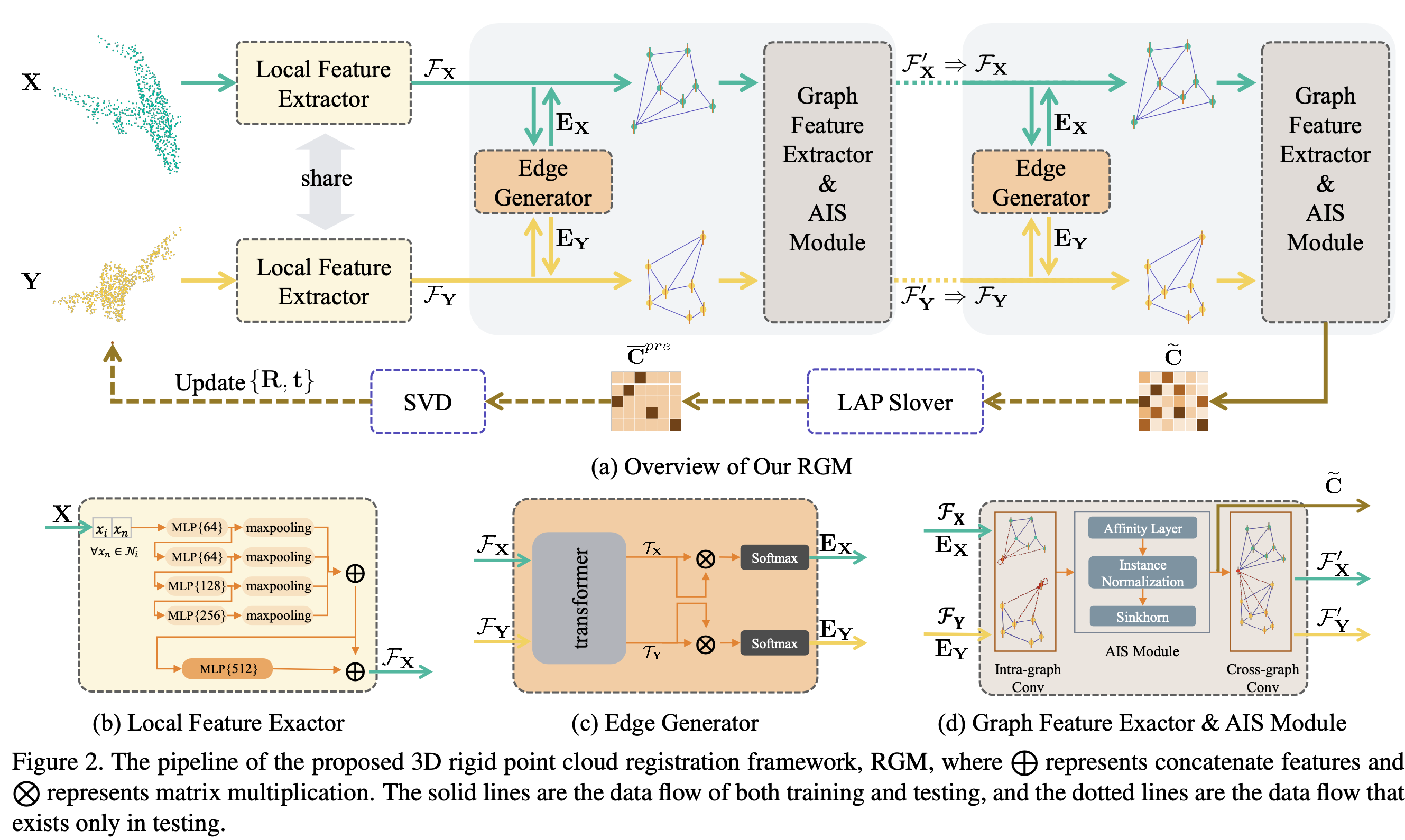
图2就是整个 RGM 网络的 pipeline,主要分成4个部分:
- Local Feature Extractor
- Edge Generator
- Graph Feature Extractor and AIS Module
- LAP Slover and SVD
2.1. Local Feature Extractor
首先是使用局部特征提取器来提取点云的局部特征,对于每一个点 $x_i$,其 local feature descriptor 表示为:
\[\mathcal{P}_{x_{i}}=\left\{\left(x_{i}, x_{n}\right) \mid \forall x_{n} \in \mathcal{K}_{i}\right\}\\\]$\mathcal{K}_i$ 表示 $x_i$ 的 $K$ 个最近邻。
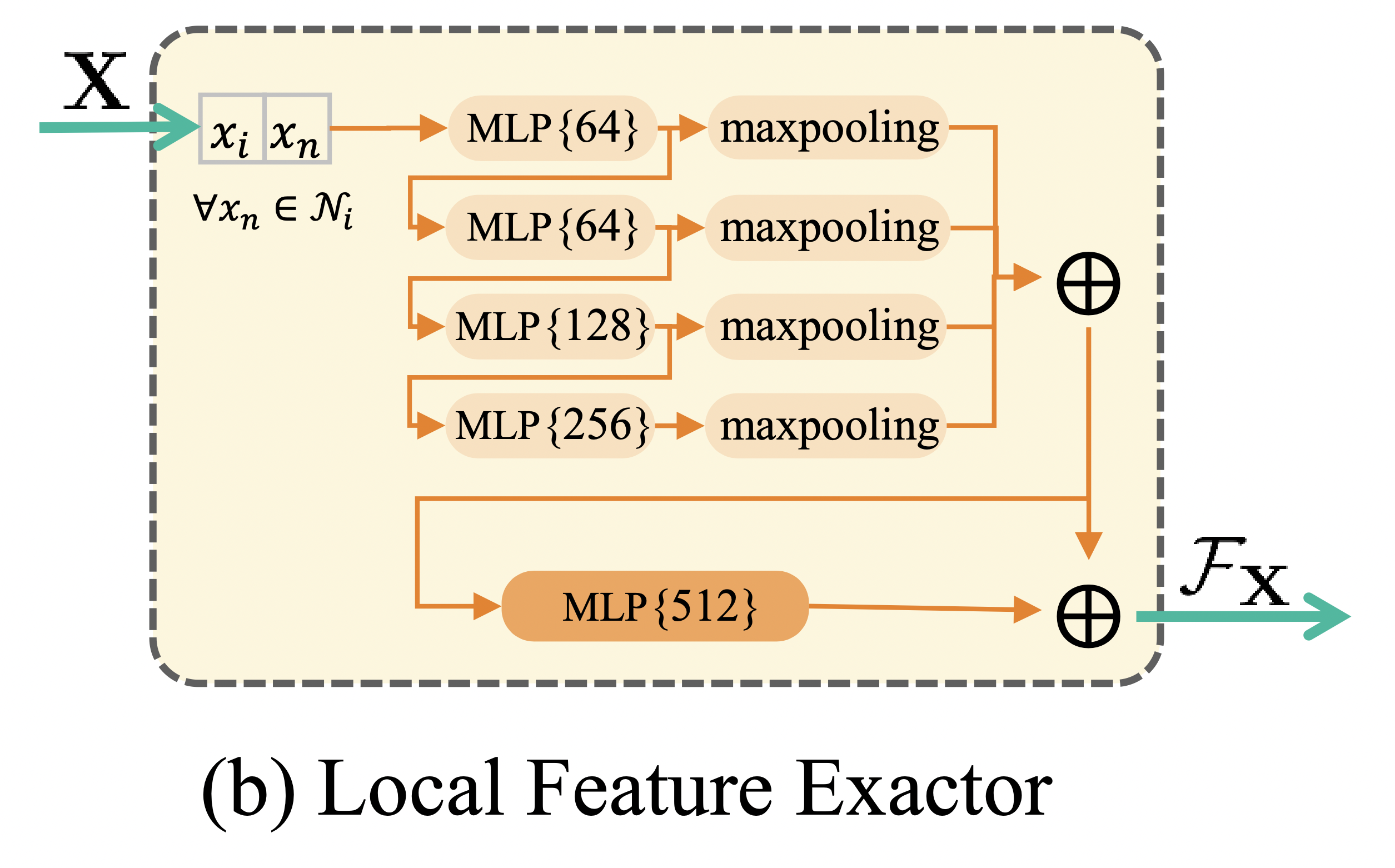
可以看到,\(\mathcal{P}_{x_i}\) 是一个 $\mathbb{R}^{K\times6}$ 的矩阵,通过 $f_\theta$ 将其映射到一个 $V$ 维向量 \(\mathcal{F}_{x_{i}}\),即
\[\mathcal{F}_{x_{i}}=f_{\theta}\left(\mathcal{P}_{x_{i}}\right).\\\]图(b)为特征提取器的网络结构,将不同MLP层的向量拼接起来,这样可以提取到多尺度的特征。最终对于每个点 $x_i$,都生成了一个512维的特征向量 \(\mathcal{F}_{x_{i}}\)。
注意这里的 $\mathbf{X}$ 和 $\mathbf{Y}$ 都是共用相同的网络参数,这样的话点云越相似,那么生成的特征向量也会更相似。
然而只使用局部特征向量的话,很难准确预测点与点之间的对应关系,因为只包含了局部信息,缺乏全局的结构信息。因此作者提出通过点云建图,然后用深度图匹配(deep graph matching)来建立对应关系。
2.2. Edge Generator Based on Transformer
将从 $\mathbf{X}$ 和 $\mathbf{Y}$ 生成的图记为 source graph \(\mathcal{G}_s=\left\{\mathbf{X},\mathbf{E}_\mathbf{X}\right\}\) 和 target graph \(\mathcal{G}_t=\left\{\mathbf{Y},\mathbf{E}_\mathbf{Y}\right\}\)。 这里的 $\mathbf{E}$ 为邻接矩阵。
从点云建图的方法有 full connection, nearest neighbor connection 和 Delaunay triangulation,但是这些方法不能有效地聚合图的特征。于是作者使用了 NLP 中很火的 transformer,来学习节点之间的软连接关系。
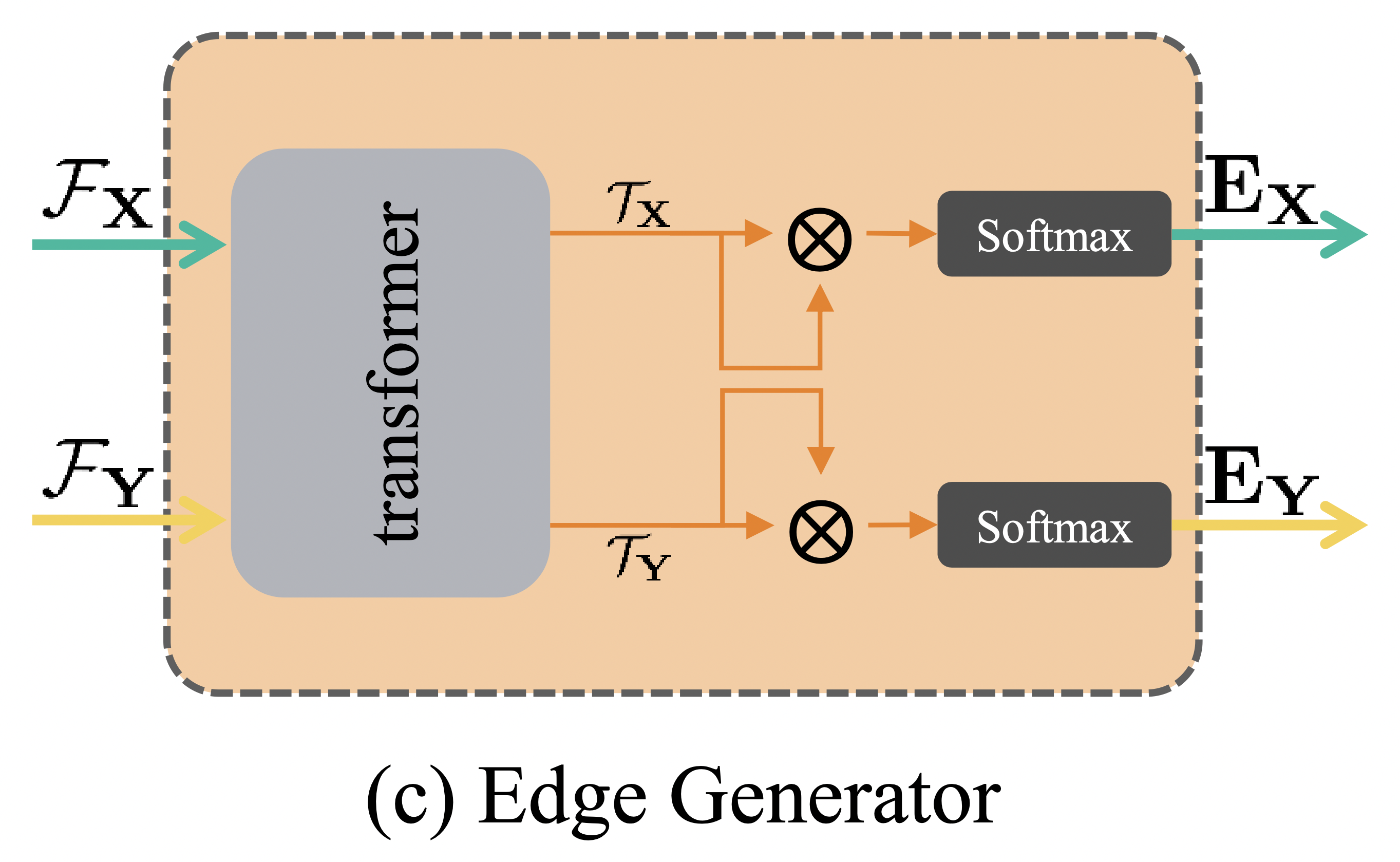
图(c)为边生成器的网络结构,transformer由几个堆叠的编码器和解码器组成,编码器使用了 self-attention 和 shared MLP,而解码器是基于 co-attention 机制。
Transformer 将节点特征 \(\mathcal{F}_\mathbf{X}\) 和 \(\mathcal{F}_\mathbf{Y}\) 作为输入,然后将它们编码成嵌入特征(embedding feature) \(\mathcal{T}_\mathbf{X}\) 和 \(\mathcal{T}_\mathbf{Y}\):
\[\mathcal{T}_{\mathbf{X}}, \mathcal{T}_{\mathbf{Y}}=f_{\text {transformer}}(\mathcal{F}_{\mathbf{X}}, \mathcal{F}_{\mathbf{Y}})\\\]边的软邻接矩阵通过特征向量的内积,再接一个 softmax 归一化来表示:
\[\mathbf{E}_{\mathbf{X}}=\operatorname{softmax}(\langle\left(\mathcal{T}_{\mathbf{X}}\right)^{T}, \mathcal{T}_{\mathbf{X}}\rangle)\\\] \[\mathbf{E}_{\mathbf{Y}}=\operatorname{softmax}(\langle\left(\mathcal{T}_{\mathbf{Y}}\right)^{T}, \mathcal{T}_{\mathbf{Y}}\rangle)\\\]2.3. Graph Feature Extractor
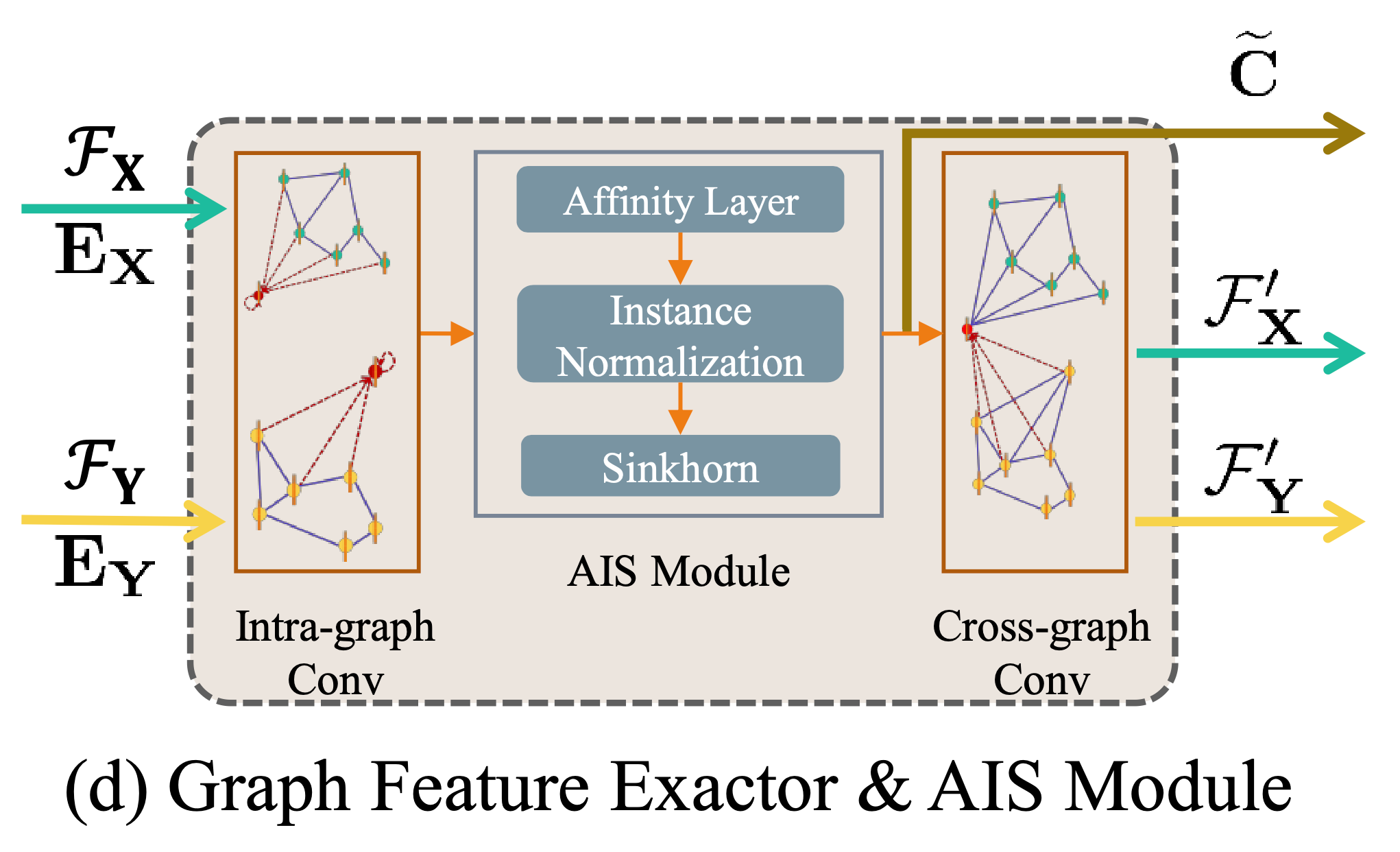
在得到了图结构之后,就可以用图特征提取器来提取特征了,首先通过图内卷积(intra-graph convolution) 计算图 \(\mathcal{G}_s=\left\{\mathbf{X},\mathbf{E}_\mathbf{X}\right\}\) 的结构特征 $\mathcal{F}_{x_i}^{corr}$:
\[\mathcal{F}_{x_{i}}^{corr}=\sum_{j=1}^{N}\breve{\mathbf{E}}_{i, j} * f_{adj}(\mathcal{F}_{x_{j}})+f_{self}(\mathcal{F}_{x_{i}})\\\]文中表示 $\breve{\mathbf{E}}$ 是从 ${\mathbf{E}}$ 归一化得来的,但我很疑惑,${\mathbf{E}}$ 本身不就已经通过 softmax 归一化了吗?
这个结构其实就是普通的GNN模型,如果从消息传播的角度来说,$f_{adj}$ 表示从邻居节点汇合信息, $f_{self}$ 表示自身信息。
2.4. AIS Module
在提取完图特征之后,用 AIS 模块来计算软对应矩阵。AIS 模块由 affinity layer, instance normalization 和 Sinkhorn 三部分组成。
2.4.1. Affinity Layer
Affinity Layer 用于计算两个图之间的相似性。
两个图之间的相似度矩阵 $\mathbf{A}$ 通过结构特征 $\mathcal{F}^{corr}$ 来计算:
\[\mathbf{A}_{i, j}=(\mathcal{F}_{x_{i}}^{corr})^{T} \mathbf{W}(\mathcal{F}_{y_{j}}^{corr})\\\]这里 $\mathbf{W}$ 是神经网络中的可学习参数。
2.4.2. Instance Normalization
在计算出 $\mathbf{A}$ 之后,还有一个问题,就是此时矩阵中的值可能是负的,因此还需要进行归一化。通常的做法是按行或列 softmax 归一化,但可能带来的问题是会改变行或列之间的大小关系,例如图3中,本来虚线框内最大的元素是(5,2),但在按列归一化之后,最大的元素变成了(2,1)。
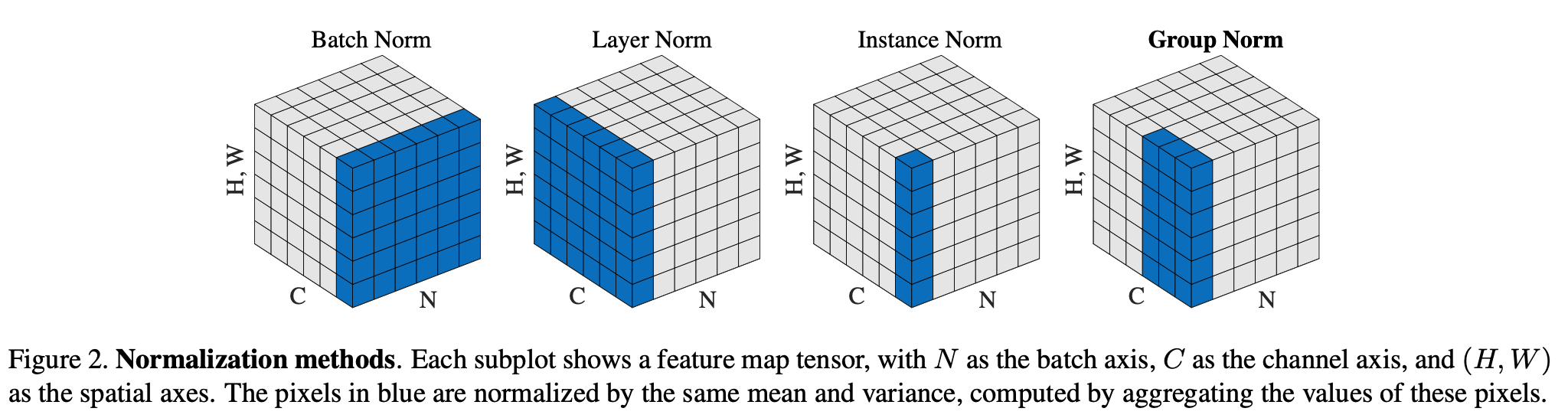
为了避免这种情况,作者使用了 Instance Normalization,可以看这篇文章 模型优化之Instance Normalization - 知乎 简单了解一下,下面这张图就是各种归一化方法的差异。
2.4.3. Sinkhorn Layer
关于这个 Sinkhorn Layer,论文中只提了一句:
Using Sinkhorn to compute the soft correspondence matrix $\widetilde{\mathbf{C}}$.
然后就跳过去了,由于这篇论文参考的是 ICCV2019 的《Learning Combinatorial Embedding Networks for Deep Graph Matching》,所以我们找到该论文中对于 Sinkhorn Layer 的描述。
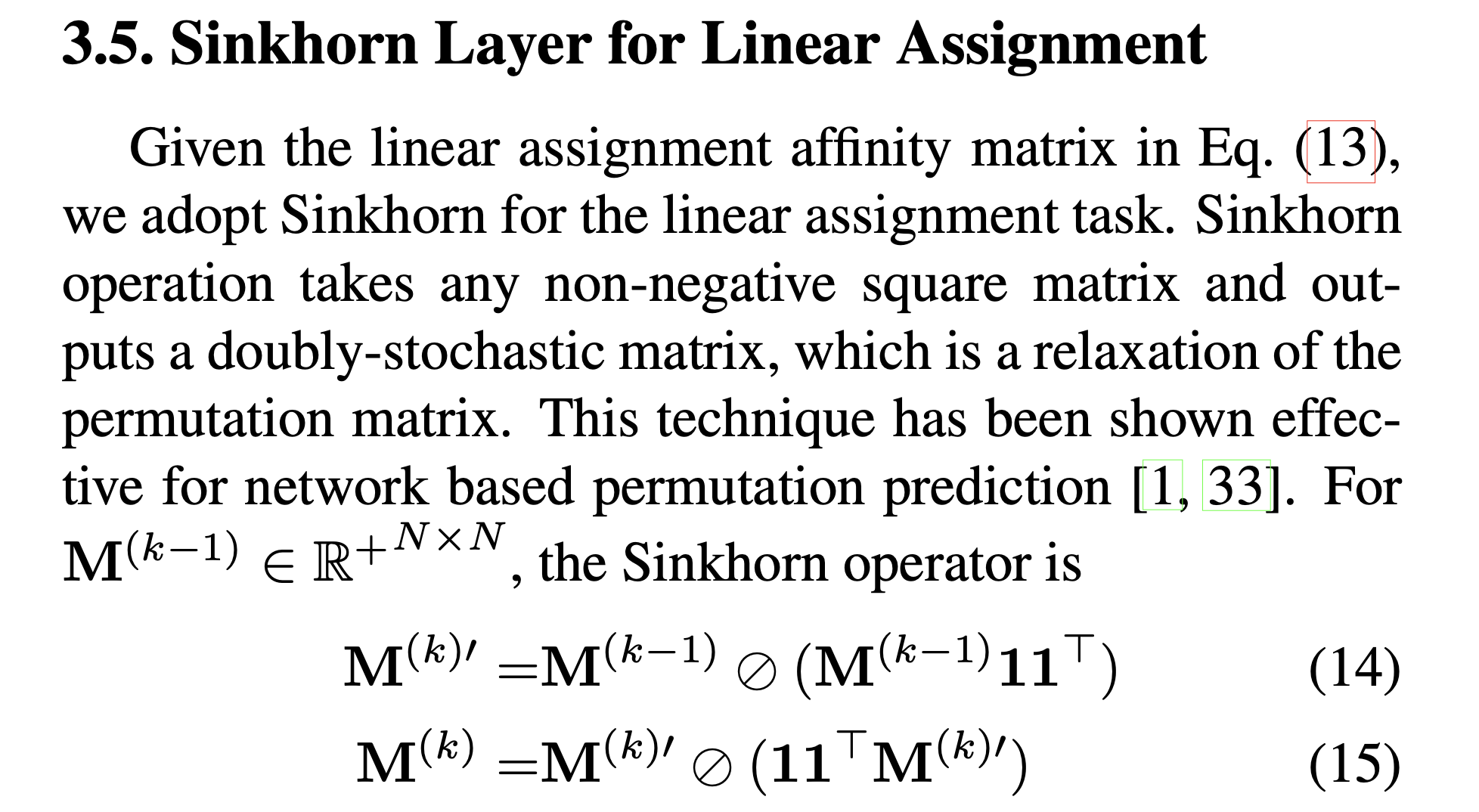
说白了,就是先行归一化,再列归一化,反复迭代,最后得到软对应矩阵 $\widetilde{\mathbf{C}}$。
说实话这个 Instance Normalization 和 Sinkhorn Layer 感觉非常牵强,没看出有啥意义。
2.4.4. Cross-graph conv
在得到软对应矩阵 $\widetilde{\mathbf{C}}$ 之后,作者用图间卷积(cross-graph conv)来增强特征的图间相关性:
\[\mathcal{F}_{x_{i}}^{\prime}=f_{\text {cross}}(\mathcal{F}_{x_{i}}^{\text {corr}}, \sum_{j=1}^{\mathrm{M}} \widetilde{\mathbf{C}}_{i, j} * \mathcal{F}_{y_{j}}^{\text {corr}})\\\]如果 $x_i$ 和 $y_j$ 越相似,那么 \(\mathcal{F}_{x_{i}}^{\text {corr}}\) 和 \(\sum_{j=1}^{\mathrm{M}} \widetilde{\mathbf{C}}_{i, j} * \mathcal{F}_{y_{j}}^{\text {corr}}\) 也会越相似,最终得到新的节点特征 \(\mathcal{F}_{x_{i}}^{\prime}\)。
2.5. LAP Slover and SVD
由于 $\widetilde{\mathbf{C}}$ 为软对应矩阵,因此作者使用基于匈牙利算法的 LAP 求解器将其转化为一个 0-1 矩阵 ${\overline{\mathbf{C}}}^{pre}$, 然后使用 SVD 求解。
其实感觉这个也没必要,转化为硬分配矩阵,增加了步骤不说,而且还降低了鲁棒性。
2.6. Loss
作者考虑到 SVD 步骤是不可微的,所以并不是用配准结果作为衡量,而是用 $\widetilde{\mathbf{C}}$ 与 ground-truth 对应矩阵 $\overline{\mathbf{C}}^{gt}$ 的交叉熵作为 loss 函数:
\[\text{loss}=-\sum_{i}^{N}\sum_{j}^{M}(\overline{\mathbf{C}}_{i, j}^{g t} \log \widetilde{\mathbf{C}}_{i, j}+(1-\overline{\mathbf{C}}_{i, j}^{g t})\log(1-\widetilde{\mathbf{C}}_{i, j}))\\\]其实 SVD 过程是可微的,参考 Deep Closest Point,当然这样也不错。
3. 实验
在 ModelNet40 数据集上进行测试,对于每个模型,从网格中采样出 2048 个点并缩放到单位球上。作者随机取 1024 个点作为源点云 $\mathbf{X}$,然后对 $\mathbf{X}$ 做一个旋转变换得到目标点云 $\mathbf{Y}$, 旋转角范围为 $[0,45]^{\circ}$ ,位移范围为 $\left[-0.5,\ 0.5\right]$。
评估标准有6个:
- Mean isotropic errors (MIE) of $\mathbf{R}$ and $\mathbf{t}$ proposed in RPM-Net
- Mean absolute errors (MAE) of $\mathbf{R}$ and $\mathbf{t}$ used in DCP
- Clip chamfer distance (CCD)
这里的 $\hat{\mathbf{X}}$ 是旋转后的源点云。
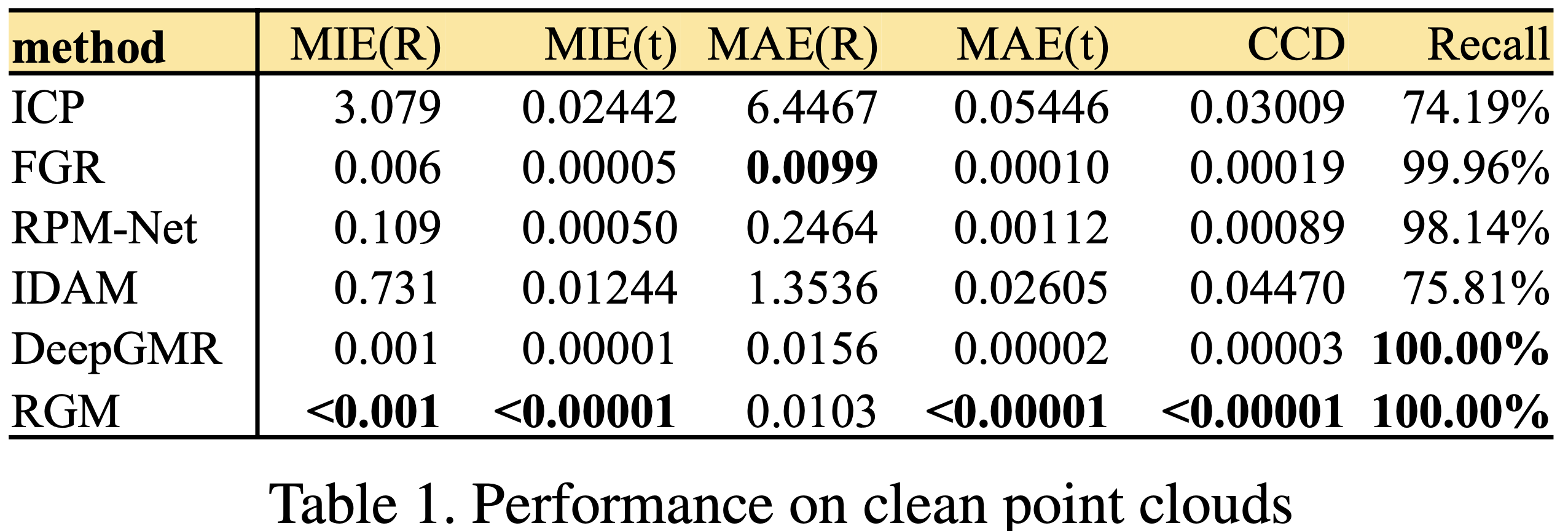
整体的实验结果如下:
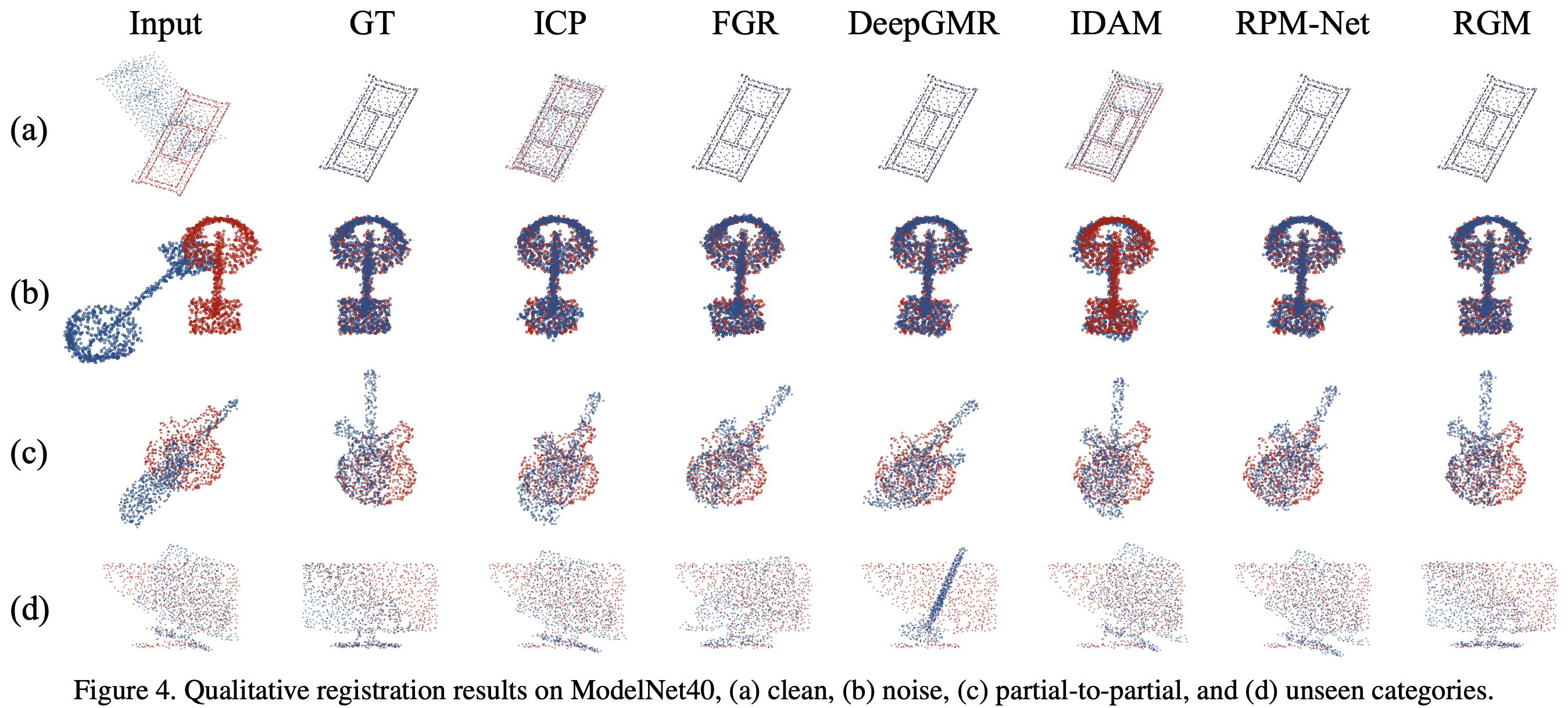
3.1. Clean Point Cloud
3.2. Gaussian Noise
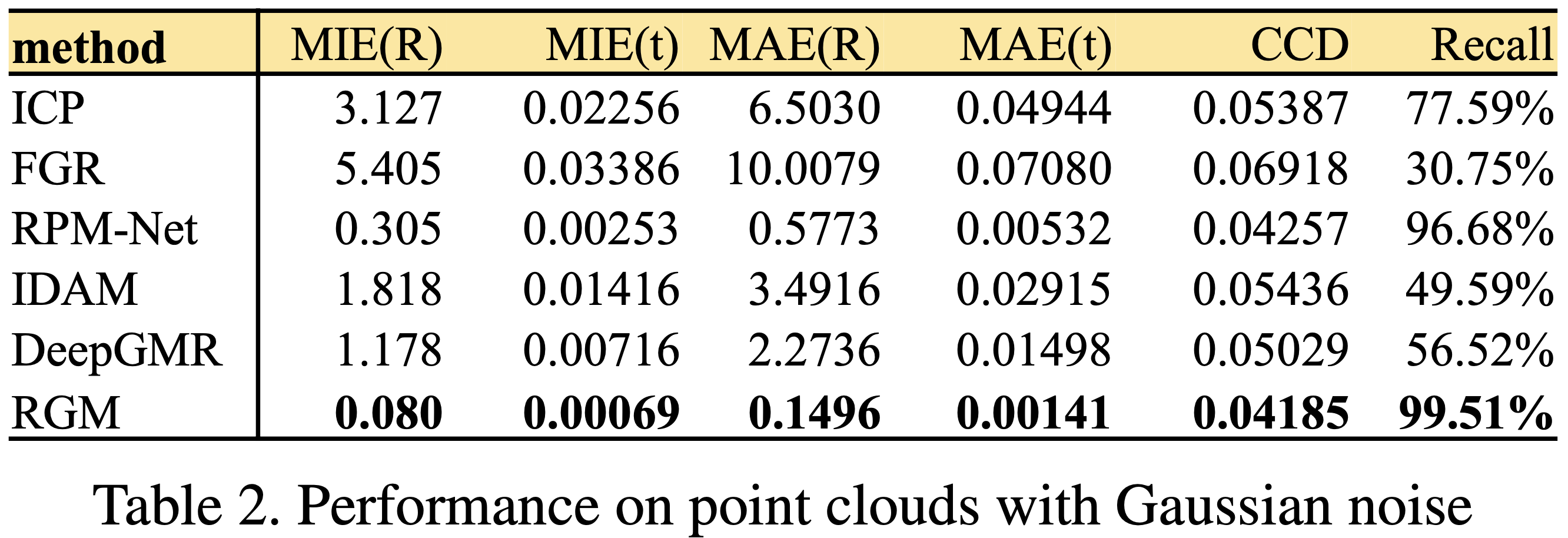
添加 $\mathcal{N}\left(0,\ 0.01\right)$ 的高斯噪声和随机位移 $\left[-0.05,\ 0.05\right]$。
3.3. Partial-to-Partial
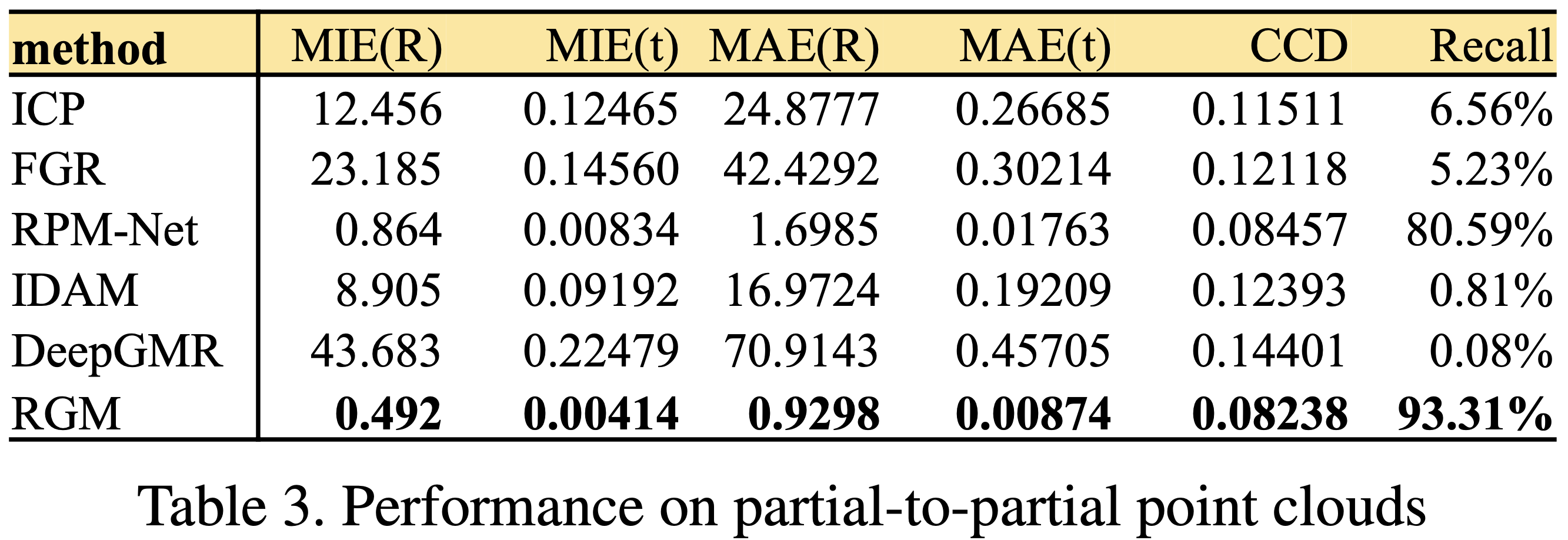
参考 RPM- Net,使用随机平面切掉 30% 的点。
3.4. Unseen Categories
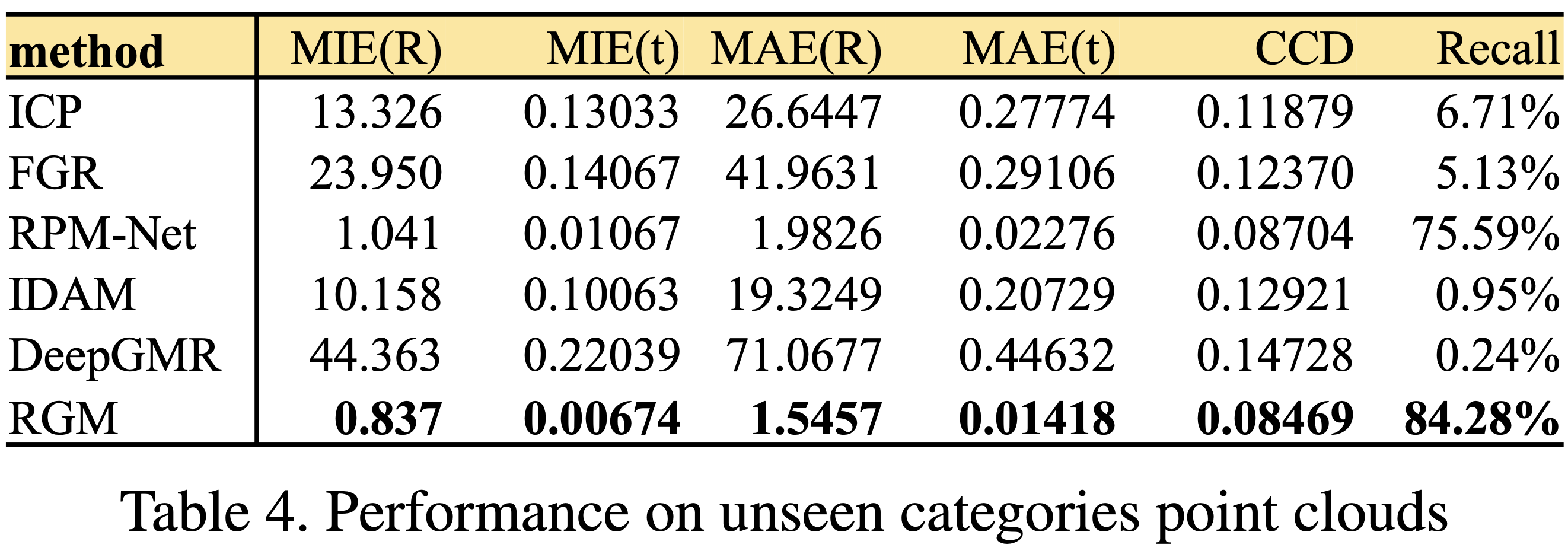
为了测试泛化能力,在20个未训练种类的物体上进行测试。
3.5. Ablation Studies
为了测试 AIS 模块到底有没有用,作者设计了消融实验。
变体1:用 $e^{-\left(\mathbf{D}_{i,j}\ -\ 0.5\right)}$ 代替AIS模块来计算特征间的相似性,然后用 Sinkhorn 计算软对应矩阵 $\widetilde{\mathbf{C}}$。这里 $\mathbf{D}$ 表示节点特征间的 L2 距离。
变体2:将基于 transformer 的边生成器,替换为全连接边。
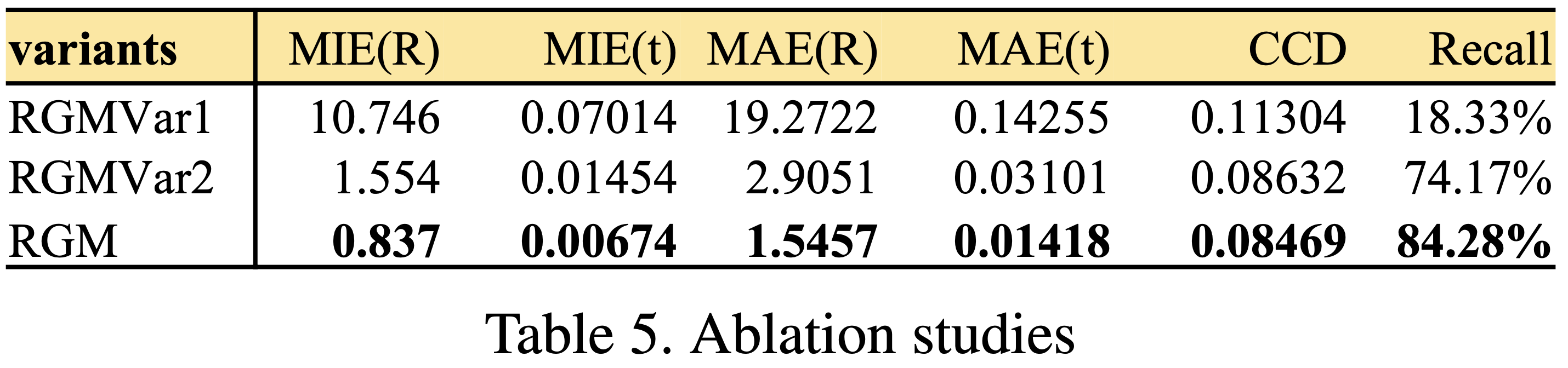
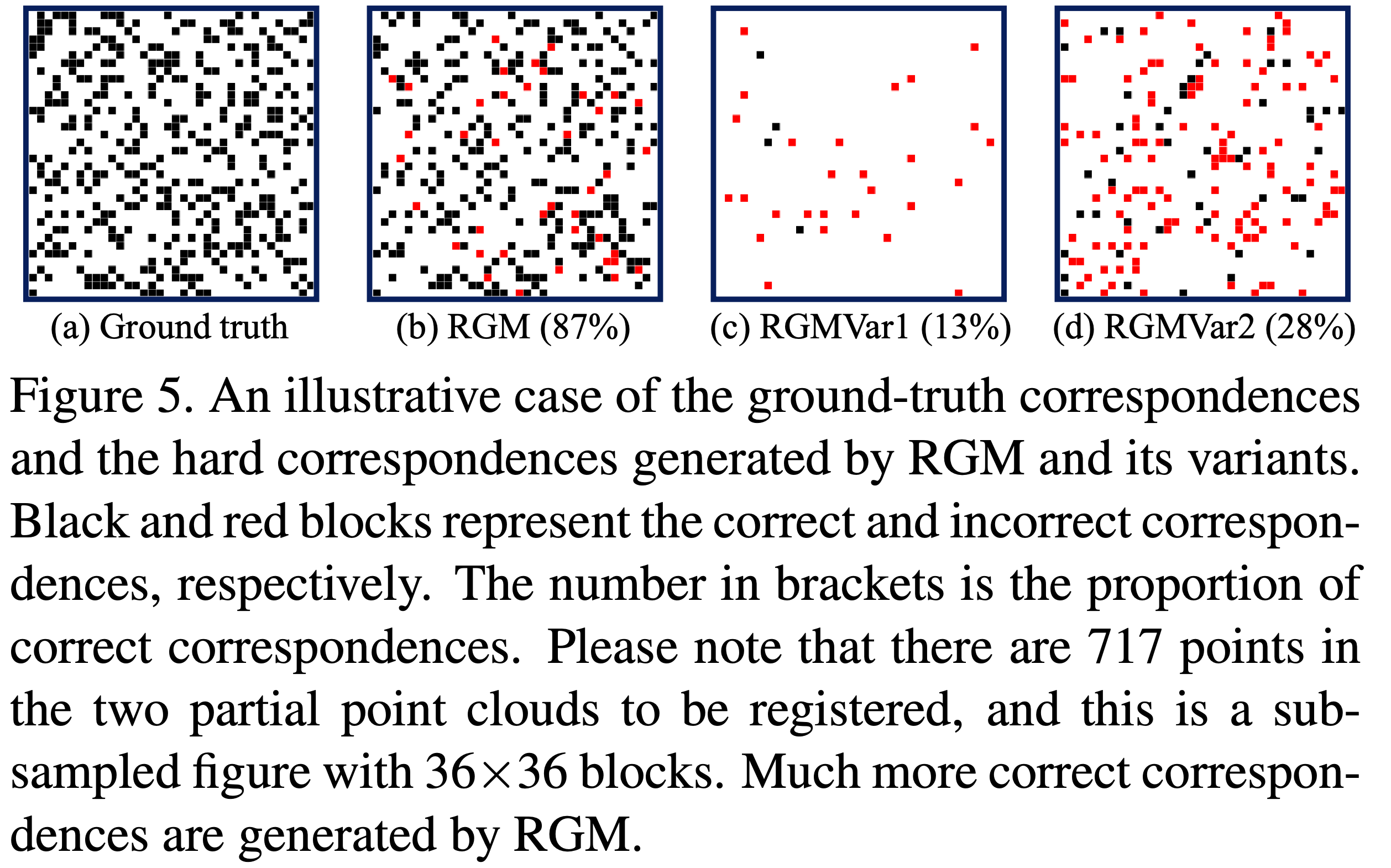
那么我收回之前的话,AIS 模块还是很有用的。。。
4. 总结
整体来看,模型的设计还是不错的。以下为一些个人观点:
- 使用 transformer 来生成边,这个方法还是缺乏实际意义。虽然进行了消融实验,但只能证明全连接的建图方法不适合该网络。 如果能将生成的图可视化出来,让我们观察到 transformer 生成的图到底长什么样,这样会更有说服力。
- SVD 如果用软对应矩阵会是什么样的结果呢?如果准确率降低了问题出在哪?
- 在实际生活的场景中,配准效果如何?网络的推理速度如何?
- 对于配准失败的例子,瓶颈是在哪一步呢?